
 - TS Electrotechnique
- TS Electrotechnique
- Des livres à lire - Nouveau Livre ! - Liens et adresses -
Shanon - Contrôle prédictif - Lyapunov - DSP - Filtre RIF
Modes glissants - Conversion sigma-delta - Modulation AM - Commande avec frottement sec
Identification en boucle fermée et réglage d'asservissement
à l'aide du banc EMERICC
(ce système est commercialisé par la Société Barras Provence)
Le système utilisé est un banc de translation actionné par un moteur à courant continu, attaqué par un hacheur, et muni d'une carte d'axe industrielle. La position est mesurée par un codeur incrémental.
Vous trouverez ci-dessous, non pas le texte du TP, mais l'ensemble des concepts qui m'ont semblé importants. La manière de procéder au questionnement est affaire de penchants.
Il s'agit d'un TP de fin de seconde année en TS Electrotechnique (essais de systèmes).
Les étudiants ont déjà vu :
1) la théorie des asservissements, en Physique Appliquée, jusqu'au correcteur PID.
2) les 4 blocs fondamentaux : Gain, Intégrateur, Filtres passe-bas d'ordre 1 et 2. Ceci leur a permis, au cours d'un précédent TP, de :
a) disposer d'un langage capable de caractériser une large gamme de réponses indicielles.
b) aborder les notions de dissipation et de stockage d'énergie.
c) comparer l'essai harmonique - vu en physique - et l'essai indiciel, justifié par son équivalence au précédent et son utilité opérationnelle dans l'industrie.
3) la mise en service de blocs PID sur automate TSX 17 ou TSX 37
4) le moteur à courant continu, le hacheur et le codeur.
On aborde à présent un problème pratique : comment modéliser la boucle ouverte - nécessaire pour appliquer la théorie - sur un système instable en BO, et qui fonctionne déjà partiellement en BF ?
La démarche consistera à :
1) procéder à un essai indiciel facile, en conservant la boucle fermée : les dangers sont limités, ainsi que la durée d'indisponibilité du système.
2) identifier le système en BF à un second ordre linéaire.
3) calculer un modèle cohérent en BO
Ce TP est aussi l'occasion d'aborder quelques notions essentielles pour le praticien :
1) solliciter un système dans un domaine où il peut être considéré comme linéaire.
2) obtenir des données exploitables hors ligne.
3) mettre en oeuvre un essai indiciel.
4) utiliser des approximations raisonnées.
5) appliquer les connaissances théoriques de manière simple.
6) confronter les résultats expérimentaux avec les connaissances à priori sur la structure du système.
Première idée : l'essai en boucle ouverte pose plein de problèmes.
Sur ce point, il assez facile d'amener les étudiants à découvrir la probable divergence de la position, soit par la consigne directement, soit par les décalages électroniques. La présence d'interrupteurs de fin de courses ne règle que partiellement la question : on risque d'être embêté par la non-immobilité à commande nulle.
Deuxième idée : un trop grand débattement sollicite les non linéarités du système.
Le correcteur utilisé, à base de 8051, travaillera à erreur saturée pour un échelon trop grand. De même, un gain trop élevé saturera la sortie (ce qui est un peu moins grave). Illustration : la réponse ci-dessous ne peut pas être celle d'un second ordre.
Donc : consigne faible : on choisit 10 mm. Gain faible : voir ci-dessous.
Troisième idée : obliger le système à répondre en boucle fermée comme un second ordre peu amorti.
L'idée rejoint celle de Ziegler et Nichols, sans aller jusqu'à l'auto-oscillation : c'est moins dangereux, mais met en évidence deux paramètres facilement identifiables, la pseudo pulsation wo et le coefficient d'amortissement z .
Le gain est choisi par les étudiants pour obtenir z ~ 0,4. Le résultat ressemble à :
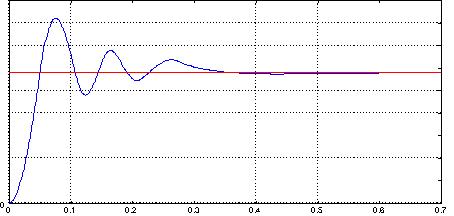
Notez bien que la réponse obtenue n'est pas non plus celle d'un second ordre : " wo " n'est pas constant. Mais il paraît légitime d'approcher le résultat par la réponse théorique d'un second ordre : on obtient alors l'ordonnée de l'asymptote A, z et wo, ce qui donne la F.T. en BF : H(p).
Bien sûr, il aura fallu désactiver toute correction I et D, sous peine de rendre les données plus difficiles à exploiter.
Quatrième idée : trois lignes de calcul permettent de passer de H(p) à la FT en BO : F(p), en tenant compte du gain K qui a servi à obtenir les paramètres de H(p).

Attention : le gain statique en BF risque de ne pas être exactement égal à 1, c'est à dire que l'asymptote n'est pas exactement à 10 mm. Cela provient des frottements secs ; guider les élèves vers un gain assez fort pour qu'on puisse prendre A~10mm.
Alors, si vous avez trouvé un gain statique égal à 1 en boucle
fermée, eh bien vous découvrez qu'on aboutit à :  . Intéressant, n'est-il pas ?
. Intéressant, n'est-il pas ?
Evidemment, si vous avez " zoomé " pour mesurer
avec une très grande précision le gain statique en BF, et que vous avez trouvé, mettons
0,98 , alors vous débouchez sur quelque chose du genre :  l'une des constantes de temps étant beaucoup plus grande que
l'autre.
l'une des constantes de temps étant beaucoup plus grande que
l'autre.
C'est là qu'intervient l'idée suivante : réfléchir et tenter de donner un sens physique aux opérations qu'on a menées.
La fonction de transfert contenant un intégrateur et un premier ordre correspond évidemment à la transformation vitesse => position et à la constante de temps électro-mécanique du moteur chargé.
L'apparition de deux constantes de temps n'est due qu'à l'erreur produite par les frottements secs et autres perturbations constantes, qui provoquent une erreur statique. Une très grande constante de temps n'est pas très différentiable d'une intégration : c'est l'observation de la structure technologique qui nous conduit à la solution.
Il me semble plus facile de tricher un peu et d'amener les étudiants à prendre dès le départ un gain de boucle fermé assez grand pour déboucher naturellement sur la première solution ; l'exploitation n'est déjà pas facile pour eux dans ces conditions. Eventuellement, on pourra faire étudier après coup le deuxième cas, histoire de signaler le type de pièges qui peut se présenter.
Une fois passé cet écueil, c'est facile : les étudiants ont déjà rencontré la constante de temps électromécanique, en TP et sur des docs constructeur. Ils peuvent comparer.
Pour enfoncer le clou, je donne aussi la documentation du banc, comprenant masses, moments d'inertie, docs moteur, réducteur, etc... Un rapide calcul montre que ce qu'on a trouvé n'est pas idiot, à 15 % près.
Sixième idée : Jusqu'ici, on a convaincu certains élèves que la magie des équations permettait des merveilles. Mais il faut maintenant les convaincre de l'utilité du procédé, c'est à dire leur faire obtenir un résultat : on demande donc de régler le système pour obtenir une correction proportionnelle donnant 45 ° de marge de phase (regardez, c'est immédiat). Résultat, on peut travailler dans les règles et prévoir un comportement (étudié auparavant en théorie).
Je ne cherche pas plus loin, et n'introduit pas le correcteur I ou D supplémentaire. Mais pourquoi pas, puisqu'on a tout pour le faire ?
Durée totale : 2 x 5 heures
Ce TP a été mis au point au cours d'une série d'essais de systèmes étalée sur plusieurs années. La version " aboutie " a été présentée en 95-96 à des collègues de CPGE venus s'initier aux asservissements pour leur nouveaux programmes.
En 1994, j'avais recours à un calculateur pour reconstituer F(p). Ca alourdissait beaucoup le TP, les élèves ayant quand même du mal à dominer l'ensemble des idées présentées. J'ai préféré le travail sur papier pour cette partie.
10 heures (compte-rendu compris) conviennent bien ; une question subsidiaire permet de faire tester aux plus rapides l'influence de la masse embarquée sur le chariot. Vous constaterez qu'elle est faible, la constante de temps passant de 60 à 70ms environ, avec une dépendance délicate à affiner à cause des multiples approximations.
Deux points technologiques sont à noter :
1) L'inertie (ramenée à l'arbre primaire) prépondérante est celle du moteur (petit, mais rapide) : c'est un cas fréquent.
2) Le rapport de réduction est un peu fort, j'aurais aimé avoir plus de dépendance vis à vis de la masse. Moins efficace, mais plus pédagogique ...
Ce TP, qui est une révision assez approfondie des principes de base, nécessite un accompagnement soigné des étudiants. Les modes de pensée mis en jeu dans les asservissements calculés ne leur sont pas encore familiers.
Pour les textes de TP et autres renseignements, me contacter.
Merci aussi de me contacter pour toutes remarques et suggestions.
retour à la page TS électrotechnique - retour à la page d'accueil
- TS Electrotechnique
- Des livres à lire - Nouveau Livre ! - Liens et adresses -
Shanon - Contrôle prédictif - Lyapunov - DSP - Filtre RIF
Modes
glissants - Conversion sigma-delta - Modulation AM - Commande avec
frottement sec