 - TS Electrotechnique
- TS Electrotechnique
- Des livres ŗ lire - Nouveau Livre ! - Liens et adresses -
Shanon - ContrŰle prťdictif - Lyapunov - DSP - Filtre RIF
Modes glissants - Conversion sigma-delta - Modulation AM - Commande avec frottement sec
Capteurs Cinťmatiques
Certains dessins ont ťtť omis afin d'accťlťrer le chargement de la page
Les capteurs de grandeurs cinťmatiques : position, vitesse et accťlťration, tant en rotation qu'en translation, sont parmi les plus importants, puisque la plupart des procťdťs industriels prťsente des organes en mouvement.
ex : bandes transporteuses, chariots, ascenseurs.
ex : machines d'usinage.
ex : production d'ťnergie par machines tournantes.
ex : rťglage de dťbits par la position de vannes, mesure de niveaux par la position de flotteurs.
Il existe une grande variťtť de prťsentation de ces capteurs, mais on la plupart d'entre eux utilisent une gamme limitťe de principes physiques.
I. Capteurs rťsistifs de position : potentiomŤtres
Un potentiomŤtre est un capteur de position : ŗ la position du curseur correspond une rťsistance bien dťfinie.
Il existe des potentiomŤtres en translation et des potentiomŤtres en rotation.
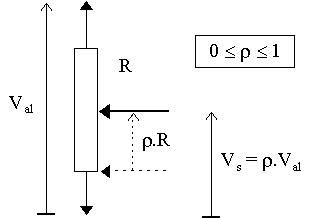
La plupart du temps, le potentiomŤtre est polarisť sous une tension fixe Val. La reprťsentation est la suivante :
La lecture de Vs est donc une image de r, proportion de la rťsistance totale. Si on choisit un potentiomŤtre linťaire, alors Vs est proportionnelle ŗ x (systŤme en translation) ou q (systŤme en rotation).
IntrinsŤquement simple dans son principe, le potentiomŤtre de mesure de position demande toutefois une attention particuliŤre :
Œ La piste rťsistive sur laquelle glisse le curseur doit Ítre d'excellente qualitť, pour assurer une bonne rťpťtabilitť de la mesure.
G On prendra garde ŗ lire la tension Vs par un dispositif ŗ forte impťdance, faute de quoi Vs ne serait plus proportionnelle ŗ r.
Ž La prťsence du contact glissant est un facteur d'usure, et interdit l'emploi en atmosphŤre explosible.
La prťsence du contact glissant peut gťnťrer des parasites : on installe souvent un condensateur de filtrage, dont la valeur doit Ítre choisie avec soin.
Dans la mesure des angles, q est obtenu modulo 2p. Vs subit en gťnťral un saut.
On rencontre de moins en moins de capteurs rťsistifs d'angles, mais ce type de capteur est toujours trŤs utilisť pour mesurer les mouvements de translation. Le capteur se prťsente sous la forme d'un tube ťtanche dans lequel plonge la tige de mesure. Les longueurs s'ťchelonnent de quelques dťcimŤtres ŗ plusieurs mŤtres. (Le prix est en consťquence.)
Ces capteurs peuvent Ítre interfacťs directement sur un module d'entrťes analogiques d'automate.
II. Capteurs optiques de position
Les capteurs optiques, introduits pendant les annťes 70, sont omniprťsents dans les systŤmes de positionnement et les rťglage de vitesse. Ils ont souvent supplantť les dynamos tachymťtriques et les capteurs rťsistifs.
II.1 Principe gťnťral
Ces dispositifs fonctionnent sur la modulation d'un rayon lumineux par un obstacle mobile.
Le plus souvent, le faisceau incident est crťť par une diode ťmettrice (LED). Le faisceau modulť est captť par un dispositif photo-sensible (photo-diode ou photo-transistor).
L'obstacle mobile est une plaque de verre ou autre matťriau transparent portant des gravures opaques. Celles-ci sont obtenus par un procťdť photographique et peuvent Ítre trŤs serrťes.
Le signal de sortie est ŗ deux niveaux : il s'agit d'un capteur ŗ sortie logique.
Deux dispositions principales sont disponibles : les codeurs absolus et les codeurs incrťmentaux
II.2 Codeurs absolus.
Ils comportent plusieurs pistes ; chacune, correspondant ŗ un bit, est munie d'un photo-capteur. Le code binaire utilisť peut Ítre quelconque, mais on trouve le plus souvent le code binaire rťflťchi (code de Gray) et le code dťcimal codť binaire (BCD).
L'intťrÍt des capteurs absolus est de fournir directement la position (modulo 2p), autorisant un fonctionnement complet de l'automatisme dŤs la mise en service - et en particulier lors des reprises ŗ la volťe aprŤs une coupure d'alimentation -.
Leur inconvťnient est qu'ils nťcessitent autant de conducteurs que de bits, soit en gťnťral en 8 et 12.
Pour les systŤmes comportant de multiples mouvements, on utilise des capteurs adressables, reliťs ŗ la partie commande par un bus. Sous le capot de protection se trouve un jeu de contacts d'adressage ; la partie commande interroge le bus en fixant l'adresse du capteur voulu. La liaison PC-PO comporte alors par exemple : 12 bits de donnťes, 3 bits d'adresse (pour 8 capteurs), et les liaisons d'alimentations.
Les codeurs absolus sont chers : au moins 3000 F pour un codeur 12 bits.
II.3 Codeurs incrťmentaux
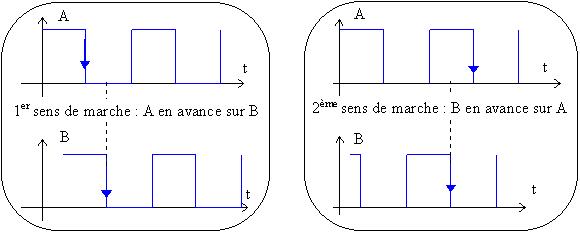
Ils comportent une ou plusieurs pistes. En disposant sur une piste deux capteurs photo- sensibles dťcalťs d' un quart de pťriode spatiale, il est possible de discriminer le sens de marche en dťtectant l'antťrioritť des signaux de la voie A ou de la voie B.
Ces capteurs doivent Ítre interfacťs sur un automate par un module de comptage rapide.
ex: on dťsire mesurer la position d'un ťcrou entrainť par une vis. Le pas de vis est de 4 mm.
La vis est elle-mÍme entrainťe par un moteur muni d'un rťducteur de rapport 1:15.
Un codeur incrťmental 100 points par tour est installť sur l'arbre du moteur.
La prťcision du positionnement peut atteindre : (1/100) x (1/15) = 1/1500 tour, soit environ le 1/5Ťme de degrť sur la vis. En terme de translation, la prťcision est : (1/1500) x 4 ~ 2,7.10-3 mm
Pour une vitesse de translation de 1600 mm.mn-1, la vitesse de rotation de l'arbre moteur est de :
(1600/4) x (15) = 6000 tr.mn -1. A cette vitesse, la frťquence des signaux du codeur est :
6000 x 100 / 60 = 10 kHz. Une interface de comptage rapide est nťcessaire.
Si on suppose maintenant une course maximale de l'ťcrou de 12 m, alors le nombre maximal de points ŗ compter est : (12000/4) x 15 x 100 = 4,5.106 : un compteur binaire ŗ 23 bits est nťcessaire.
Sur les compteurs ŗ deux voies A et B en quadrature, il est possible de quadrupler la prťcision en comptant les fronts montants ET les fronts descendants de la fonction AŇB (OU exclusif). Cette possibilitť est offerte sur la plupart des interfaces.
exercice : le dťmontrer sur un dessin
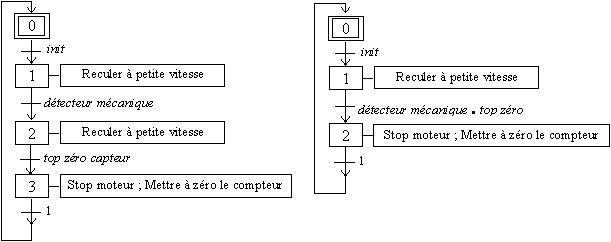
Enfin, de nombreux codeurs incrťmentaux sont ťquipťs d'une voie sťparťe Z, donnant un top par tour : le top zťro. Il permet d'initialiser la mesure pour une position prťcise dťfinie par calage du codeur lors du montage.
Dans les procťdťs oý le codeur fait plusieurs tours, on installe un capteur auxiliaire -dont la prťcision peut Ítre faible- qui valide la dťtection du top zťro sur un certain parcours (moins d'un tour) : l'initialisation du compteur est donc faite en un point bien prťcis.
Un algorithme d'initialisation d'un codeur incrťmental ressemble ŗ l'un ou l'autre de ces GRAFCETs :
L'avantage des codeurs incrťmentaux est la simplicitť d'installation (peu de c‚blage) et la grande prťcision qui peut Ítre obtenue pour un coŻt moindre qu'avec un capteur absolu (de l'ordre de 1500 F).
Le nombre de points par tour peut Ítre quelconque, et n'estbpas limitť aux puissances de deux ; les rťsolutions courantes sont 10, 50, 100, 180, 200, 360, 400, 1000 ...
De plus, le calcul de la vitesse est trŤs simple : voir plus bas.
En revanche, le dťplacement total est conservť dans le compteur, et non pas au niveau du codeur : une procťdure de rťinitialisation est nťcessaire en cas d'interruption d'alimentation.
Comme les codeurs absolus, les codeurs incrťmentaux ont un fonctionnement limitť en tempťrature : les circuits ťlectroniques fonctionnent seulement jusqu'ŗ 125įC.
II.4 Mesure de vitesse avec les capteurs optiques
Il est possible de mesurer la vitesse de rotation avec les codeurs qui viennent d'Ítre dťcrits.
1Ťre mťthode : L'unitť centrale mesure les positions ŗ une cadence T. Soit x(t) la mesure de position ŗ l'instant t, et x(t+T) la mesure ŗ l'instant suivant.
La vitesse est alors simplement donnťe par : V(t+T)=[x(t+T)-x(t)]/T, soit en prenant T=1,
V=x(t+T)-x(t).
Cette vitesse est bien sŻr mesurťe en nombre de points par unitť de temps, par exemple : 123 points en 70 Ķs, si T=70 Ķs. La conversion en unitťs internationales est en gťnťral effectuťe par l'unitť de dialogue avec l'opťrateur.
Cette mťthode est utilisable avec les codeurs absolus, qui donnent directement x(t), et avec les codeurs incrťmentaux dont le compteur associť donne aussi x(t).
2Ťme mťthode : Lorsqu'on utilise un codeur incrťmental, il est possible de connaÓtre la vitesse en mesurant le temps entre deux impulsions du codeur, ou bien en comptant le nombre d'impulsions survenant en un temps donnť.
II.5 Capteurs "linťaires"
Les deux types de codeurs ťtudiťs plus haut existent aussi en version dite "linťaire", c'est ŗ dire "en translation".
Un curseur portant les LED et l'ťlectronique de dťtection se dťplace en translation devant une rŤgle graduťe, en verre. Les signaux obtenus sont les mÍmes : deux signaux A et B en quadrature, permettant de discriminer le sens de marche. Comme sur les codeurs rotatifs, ces signaux sont souvent doublťs par leurs complťments logiques, afin d'assurer un fonctionnement correct mÍme en cas de disparition de l'un des signaux.
Ces capteurs existent jusqu'ŗ de grandes dimensions (plusieurs mŤtres), mais les versions de quelques dťcimŤtres sont les plus couramment utilisťes.
III Un capteur haut de gamme : le rťsolveur sinus
Parmi les trŤs nombreux autres capteurs de positions que l'on peut rencontrer, il nous faut citer le rťsolveur. Ce capteur dťjŗ ancien a reÁu une nouvelle jeunesse gr‚ce aux apports de l'ťlectronique moderne. La tenue ŗ la tempťrature est l'un des atouts de ce capteur robuste.
Le principe est le suivant : le mouvement de rotation - ou de translation - modifie le couplage magnťtique entre deux bobines. Cette modification du couplage est mesurťe, on en dťduit la position.
L'une des deux bobines est fixe et alimentťe en courant alternatif ; l'autre bobine est mobile et la tension ŗ ses bornes est directement liťe ŗ l'angle entre les deux axes magnťtiques.
Le plus souvent, on trouve un enroulement primaire et deux enroulements secondaires disposťs ŗ 90į.
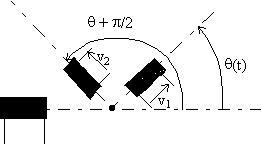
Le couplage magnťtique ťtant soignť, le coefficient de mutuelle inductance entre primaire et une bobine secondaire varie comme un sinus. En alimentant l'enroulement primaire avec un courant sinusoÔdal de pulsation w, on peut ťcrire :
v1(t) = Vmax.sin(q).sin(w.t+f)
et en appliquant une technique de dťmodulation d'amplitude, il est facile de retrouver l'information sin(q) - et cos(q) sur l'autre voie -.
Pour un fonctionnement correct, le courant primaire doit avoir une pulsation assez ťlevťe (quelques kiloHertz en gťnťral) et sa forme doit Ítre bien proche de la sinusoÔde.
La gťnťration de la porteuse et la dťmodulation sont opťrťes par une interface spťcialisťe. Les tensions dťmodulťes peuvent Ítre ensuite converties en code numťrique : si un convertisseur 12 bits est employť, alors le rťsolveur ťquivaut ŗ un codeur absolu 12 bits.
Le mÍme principe est employť pour les translations : un noyau plongeur solidaire des parties mobiles modifie le couplage entre deux bobines.
On trouve ce type de capteur directement intťgrť dans certaines ťlectrovannes asservies en dťbit ou en pression (ťlectrovannes "proportionnelles").
IV La dynamo tachymťtrique : un capteur de vitesse traditionnel
La mesure de vitesse par dynamo tachymťtrique est une technique trŤs ancienne, et on la trouve dans de nombreux systŤmes. Sa robustesse et sa bonne tenue ŗ la tempťrature en font une valeur sŻre. Pourtant, la dynamo tachymťtrique n'est pas sans dťfaut.
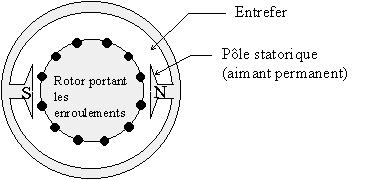
IV.1 Rappel : constitution
Le champ excitateur est produit par un aimant permanent, ce qui assure un flux bien dťfini ŗ travers le rotor, qui porte les enroulements de l'induit.

Notons :
S la surface d'une spire
B l'induction
F le flux ŗ travers cette spire
Fmax = B.S
q l'angle du plan de la spire par rapport ŗ une position de rťfťrence
W = dq / dt , qui sera supposťe constante
On peut ťcrire :
F(t) = Fmax.sin(q+q0) = Fmax.sin(W.t+q0)
dF/dt= (dF/dq). dq/dt
dF/dt = W.Fmax.cos(W.t +q0)
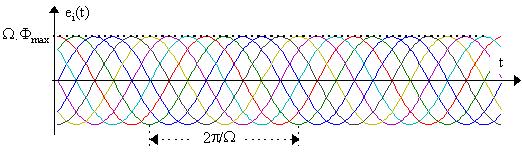
La force ťlectro-motrice e(t) aux bornes d'une spire est donc alternative ; sa frťquence et son amplitude sont toutes deux proportionelles ŗ W.
Les spires ťtant rťparties rťguliŤrement sur la pťriphťrie du rotor, elles constituent un systŤme polyphasť de tensions.
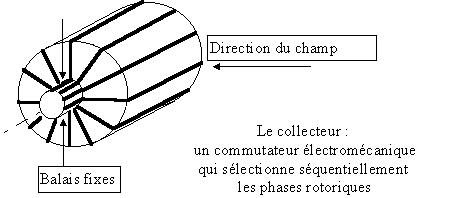
Pour obtenir un courant continu, on doit sťlectionner les diffťrentes spires de faÁon sťquentielle. Un commutateur sťlectionne la (ou les) spire(s) la mieux placťe par rapport au champ permanent : un redressement polyphasť est donc rťalisť.

Cette commutation peut se faire ťlectromťcaniquement ŗ l'aide d'un collecteur. Celui-ci comporte des lames connectťes aux diffťrents enroulements rotoriques, et alimentant un jeu de balais fixes.
Le collecteur rťalise trois fonctions :
fonction nį1 : mesurer la position du rotor
fonction nį 2 : commuter les tensions de l'induit tournant, pour assurer le redressement.
fonction nį3 : transporter l'ťnergie du rotor vers le stator
La force ťlectro-motrice rťsultante est continue, et proportionnelle ŗ la vitesse angulaire : e = k . W
Le paramŤtre k est appelť "constante de force ťlectromotrice".
Il s'exprime en [V / rad.s-1] .
IV.2 Qualitťs de la dynamo tachymťtrique
Œ La tension dťlivrťe est proportionnelle ŗ la vitesse angulaire
Elle n'a pas besoin d'Ítre alimentťe
Ž Elle existe en de nombreuses gammes : de 5V ŗ 3000 tr.mn-1 ŗ plusieurs centaines de Volts ŗ 3000 tr.mn-1.
La dynamo tachymťtrique est capable de dťlivrer une puissance faible, mais notable. Ceci lui permet d'intervenir directement comme grandeur de commande dans certains procťdťs.
Elle rťsiste bien aux tempťratures ťlevťes ( T>250įC), aux vibrations, aux champs magnťtiques.
IV.3 Dťfauts
Œ La tension dťlivrťe est ondulťe, ce qui limite la prťcision .
Cette ondulation est lente ŗ basse vitesse, ce qui complique le filtrage.
Ž Les balais sont un facteur d'usure, et interdisent l'emploi en atmosphŤre explosible.
Le prix : de 3000 ŗ 6000 FF pour un modŤle de milieu de gamme.
Les technologies modernes permettent la mesure de vitesse dans de meilleures conditions ŗ moindre coŻt.
V Les capteurs d'accťlťration : une porte ouverte sur la dynamique
Les informations de position et de vitesse sont parfois insuffisantes, et des capteurs d'accťlťration sont alors souhaitťs. Malheureusement, la mesure de cette grandeur est plus dťlicate ŗ obtenir, faute d'une dťpendance physique directe entre accťlťration et une grandeur exploitable.
La dťpendance la plus ťvidente repose sur le principe fondamental de la dynamique : l'accťlťration est reliťe ŗ une force. Aussi, les capteurs d'accťlťration sont ils en fait souvent des capteurs de force d'inertie, organisť de la maniŤre suivante :
- une masselotte, appelťe "masse d'inertie", est appliquťe sur un capteur de compression.
- les accťlťrations de l'ensemble induisent un effort de la part de la masse envers le capteur de compression, qui ťmet alors le signal correspondant.
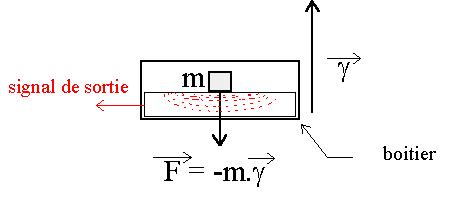
Le capteur de compression est le plus souvent un capteur piezzo-ťlectrique : soumis ŗ une force, un quartz se dťforme et gťnŤre une force ťlectromotrice.
Toute la difficultť rťside dans le comportement de ce systŤme identique ŗ l'assemblage masse -ressort : des rťsonnances apparaissent ŗ certaines frťquences, et le capteur doit Ítre proprement amorti.
Les gammes disponibles s'ťchelonnent de quelques 10-4.G ŗ 104.G () . Ces capteurs restent coŻteux, et leur usage est limitť par les difficultťs d'installation. Leur emploi concerne essentiellement la navigation, l'ťtude des chocs et des vibrations.
ex : en maintenance prťventive, des capteurs de vibrations installťs sur les paliers des moteurs permettent de suivre l'usure des roulements et de prťvenir les dťfaillances.
QQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQQ
En l'absence de capteur d'accťlťration, il est possible de calculer celle-ci.
soit x(t) la position mesurťe ŗ l'instant t, soient x(t+T) et x(t+2.T) les deux mesures suivantes.
On a vu que : v(t+T) = [x(t+T) - x(t)]/T ; de mÍme, v(t+2.T) = [x(t+2.T) - x(t+T)]/T
Enfin, l'accťlťration est donnťe par :
g(t+2.T) = [v(t+2.T)- v(t+T)]/T , soit, en prenant T comme unitť de temps :
g(t+2.T) = x(t+2.T) -2. x(t+T) + x(t)
La mesure est donnťe en nombre de points par (unitť de temps)≤, soit par exemple :
1253 points/(70Ķs)≤
Cette mesure nťcessite trois mesures de position.
FIN
retour ŗ la page d'accueil - retour ŗ la page TS ELECTROTECHNIQUE
- TS Electrotechnique
- Des livres ŗ lire - Nouveau Livre ! - Liens et adresses -
Shanon - ContrŰle prťdictif - Lyapunov - DSP - Filtre RIF
Modes
glissants - Conversion sigma-delta - Modulation AM - Commande avec
frottement sec